Successful Capture Demonstration With REACCH

COSMIC Member Kall Morris Inc (KMI) has completed another in-space demonstration of its REACCH arm, showcasing the tentacle-like robotic arms ability to successfully capture and release objects in microgravity.
The REACCH system was maneuvered and controlled by Astrobee, a NASA designed vehicle that operates aboard the International Space Station (ISS).
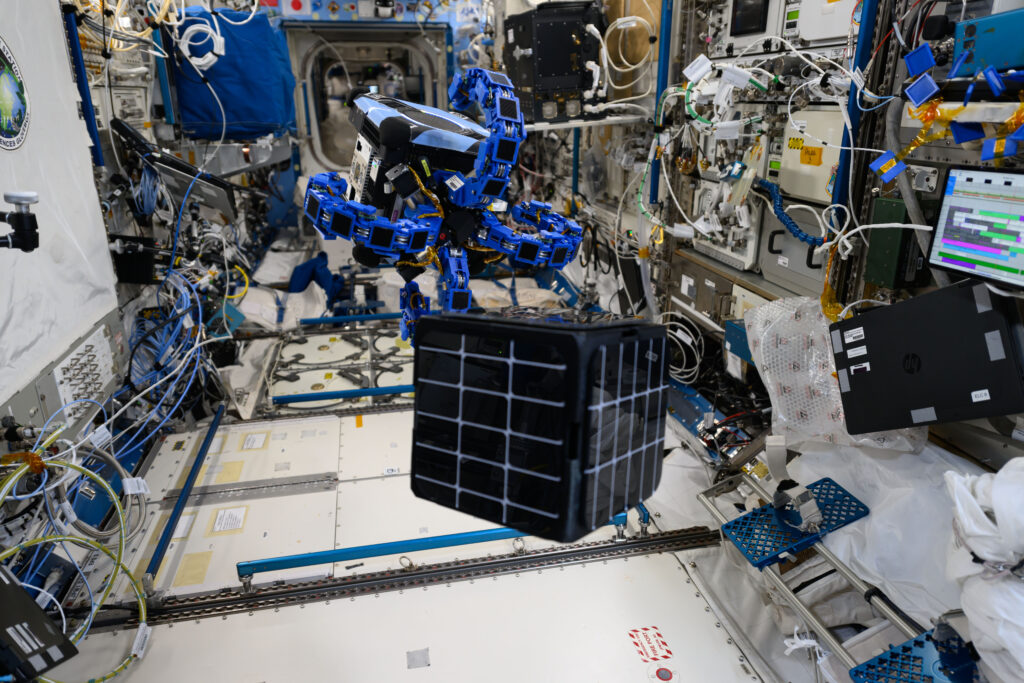
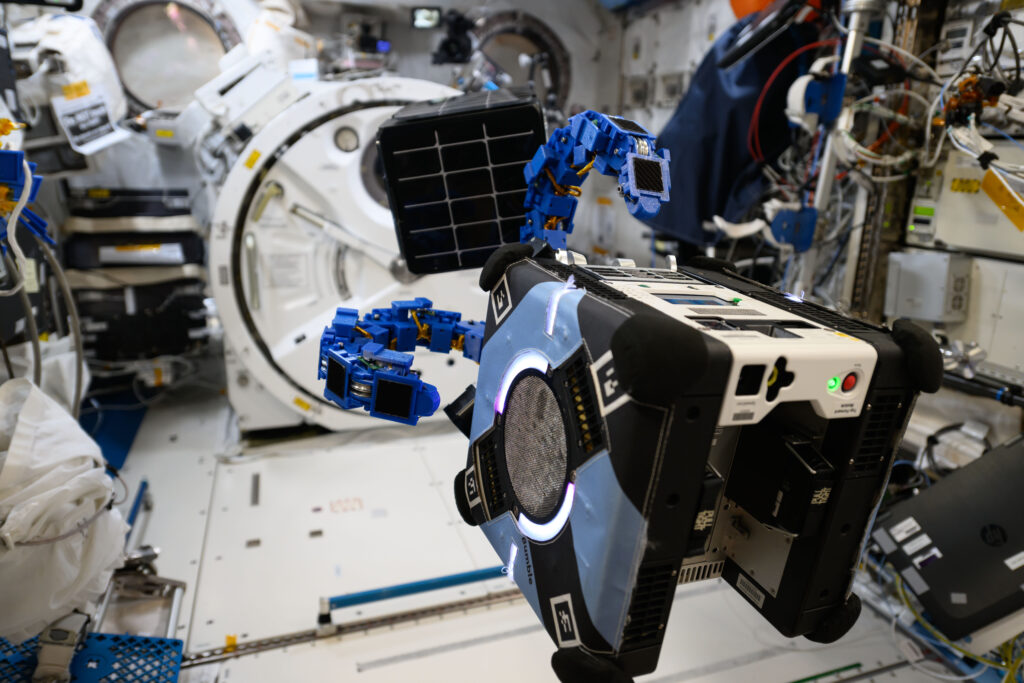

Photo Credit: NASA
Last month, the ISS posted a video of NASA Astronaut Suni Williams supervising the first of the REACHH demonstrations, which you can watch on Instagram here.
One goal of the REACCH capture system is to equip vehicles in orbit with the ability to retrieve junk materials such as dead satellites and other debris that currently pose threats to currently operational assets. By mitigating debris, REACCH can also play a role in ensuring safe travel routes and orbits for future missions.
Another massive benefit of improved capture technology in orbit is serviceability. By normalizing the economics of moving away from single-use satellites, the space economy will no longer be held back by factors such as initial restrictive fuel and hardware considerations, among other advantages.
In an announcement of the newest success, Austin Morris, KMI Co-Founder and Director of Engineering said “This demonstration showcases not only the capabilities of REACCH, but the capabilities of the KMI team as well. I am immensely proud of the quality of technology demonstration displayed, and extremely grateful to the many partners who helped bring this project to fruition.”
The announcement continued, “Some of the partners who contributed to the first in-space demo of REACCH include: ISS National Lab, NASA Astrobee Team, Nanoracks, USC, NASA Ames Research Center, NASA Johnson Space Center, NASA Marshall Space Flight Center, KMI Advisor & Retired NASA Astronaut Dr. Anna Fisher, and geCKo Materials. More ISS operations are scheduled in the coming months that will build on the insights already gained from the initial demos.”
You can read more at KallMorris.com.